九州工業大学 大学院工学研究院 機械知能工学研究系
知能制御工学コース 小村研究室
ヒトの触覚を科学し,次世代の工学技術を拓く
ロボット用の3軸触覚センサの開発
概 要
卓越した技能者の手技を記録・再生できれば,その応用範囲は大きく拡張される.その実現には,(1)技能者の触覚情報を抽出する技術,(2)それを高精度に記録する技術,(3)ロボットによって再生する技術の三要素が重要である.本研究では,これらの基盤技術としてロボット搭載用の三軸触覚センサを開発している.三軸触覚センサとは,接触面における圧力分布だけでなく,せん断力分布も同時に計測可能なセンサである.本センサは,ヒトの指先形状を模したアクリル製コアを薄いゴムシートで覆い,指先から指腹までを一体的に包む構造を有する.さらに,爪に相当する位置からゴムシートとアクリルコアの接触状態を観察できる構造を備えている.画像解析により接触領域の輝度分布およびその重心移動量を算出することで,三軸力(法線力および二方向のせん断力)や現在触ってる素材を推定することが可能である.本技術は,人間に匹敵する手作業の器用さをロボットに実装するための基盤技術となることを目指すものである.

人間支援技術実現に向けた運動錯覚の研究
概 要
運動錯覚とは、腱に適切な振動刺激を与えると、その筋が伸張する方向に動いたような固有感覚が生じる錯覚現象である.収縮方向に動く緊張性振動反射(Tonic vibration reflex)や拮抗筋が弛緩するAVR (Antagonist vibratory response)とは異なり,動くような気がするだけで実際には動かないという特徴がある.この現象は,筋や腱であれば体中のいたるところで生じる.この現象は1970年代に発見されているが,刺激を明確に統制した実験結果があまりなく,生じる条件は研究者によってかなりの幅がある.
この研究の新規性・独創性
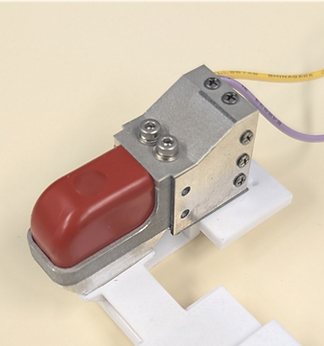
本研究では,精度の高い加振機を用いて,押しつけ力,波形,周波数,振幅を統制して実験を行い,運動錯覚を生じさせる刺激条件を明確にする.そのために,開発した装置を下図に示す.この装置を用いて,右手首の橈側手根屈筋腱に振動刺激を与えて,その時に生じる運動錯覚を左手で表現できる.リアルタイムに運動錯覚量を求めることが出来る.
応用研究
脳卒中の患者に手の動くイメージ をもってもらい,他のリハビリテーションを併用する中で回復を促進するような装置が期待される.


ヒトの触覚情報を記録するためのセンサ開発
概 要
高齢社会を迎える現代において,ヒトが感じる触覚情報を記録・再生する技術の開発は技能伝承や遠隔医療実現の観点から期待される.我々は,ヒトの人差し指の爪色変化から指腹に作用した3軸力(垂直力とせん断力)を推定するセンサの研究を進めてきた.このような人の触覚を記録する試みは様々行われてきており,皮膚振動を利用して操作者が感じる“材質感”を記録する方法や,爪色変化を利用して指腹に加わった“力”を推定する方法が開発されてきた.しかし,指腹の硬さや爪色は,外界の気温や指の姿勢,毛細血管の血流量のような身体状態の変化で容易に変化してしまい,センサを構成した環境とは異なる環境では“材質感”“力覚”の推定精度が低下してしまうという問題点があった.本研究では,指の機械特性変化や血流量変化をリアルタイムで推定する技術を開発し,その情報を用いて外部と指との相互作用を推定するというアプローチで高精度にヒトが知覚する“材質感”と“力覚”を推定する技術を開発する.
この研究の新規性・独創性
モノを触った時の指の物理的な変形を原理として利用しているにもかかわらず,様々な条件によって生じる指の性質変化を考慮してこなかった.例えば,低温では指の剛性が高くなり,また指を曲げれば爪色は変化する.触覚は刺激で変形する皮膚を通して外界をセンシングすることを考えると,皮膚の状態推定は不可欠である.本研究では,対象との接触による指の変化から皮膚感覚を推定するために,まず指の状態ついて詳細に推定するという点に新規性があり,さらに指の状態と皮膚感覚を合わせて技能の特徴を分析しようとする点に独創性がある.
応用研究
本研究では,卓越した技術を持つ人の技能を記録を実現するだけでなく,卓越した技能を持つ人の指の特徴も同時に記録することで,卓越した技術がどこから生まれるかを明らかにする.


空気圧アクチュエータを用いたスポーツ動作支援技術の開発
概 要
スポーツにおける効率的な正確動作の習得を目的としたアシスト装置の開発に取り組んでいる.関節固定用アクチュエータと収縮型アクチュエータを身体に装着し,運動学的観点から最適な配置設計および駆動タイミングの検討を行っている.動画は,左肘にアクチュエータを装着したバッティング動作支援の実験例を示すものである.

介助姿勢推定のための計測靴の開発
概 要
高齢化社会の進展により,介護現場における介助者の身体的負担が問題となっている.特に,移乗介助時の不適切な姿勢は腰痛などの原因となるため,危険姿勢を検知して注意喚起するシステムの開発が求められている.本研究では,介助作業中の姿勢を計測可能な計測靴を開発し,深層学習等を用いた姿勢推定システムの構築を行う.

Velvet Hand Illusionの基礎調査
概 要
触り心地を工学的に設計して演出する技術は新たなイノベーションを生む重要な研究課題である.これまでの研究で,触り心地の演出法としてVelvet Hand Illusion (以下:VHI)という触錯覚現象に着目し,その機序に関わる基礎調査を進めてきた.VHIとはワイヤー製の格子を両手で挟んで擦ると滑らかな面が生起する現象である.私たちのこれまでの研究から,1本線では生起せず,線で囲まれて初めて生起するVHIの特徴から「複数の線で構成されるGestaltとVHIが関連している」と考えている.Gestaltとは「部分では説明できない複合的なまとまり」とされ,視覚認識で考えられた概念である.触覚情報がプレグナンツの法則に従ってまとまり,Gestaltに触り心地が生起する一連のプロセスを解明することで,触覚情報の統合の機序解明に繋がると考えられる.本研究では,複数の触覚刺激で構成されるGestaltが脳内の認知過程の中でどのような物体面の認識となるのかを解明し,Hapticデバイスへの展開を試みる.
この研究の新規性・独創性
この研究では,触錯覚現象を利用使用しているだけでなく,その機序を解明しようとしている点に新規性がある.これまで研究されてきたGestaltのフレームワークを活用して触錯覚現象とは何なのかを説明することを試みる.そのために,心理物理学実験だけでなく,脳機能計測実験も行っている.
応用研究
触錯覚現象を利用して,色々な触り心地を提示することを最終目標とする.


